
迈步旨在提供有史以来最简单、最便捷和节省时间的智能修剪解决方案。
关注我们

迈步旨在提供有史以来最简单、最便捷和节省时间的智能修剪解决方案。
标准化解决方案
我方提供感知、导航、避障、规划、决策、系统集成整体解决方案,可根据用户提供的不同底盘和传感器需求提供对应接口
支持各类平台
提供核心集成板卡,支持灵活插拔传感器,适配多种平台,具有广泛的改造空间,帮助用户迅速构建符合其行业需求的定制化解决方案。
批量化生产计划
后续定型后可低成本复制及移植方案,有利于用户扩展应用
制定长期合作方案
可与研究单位制定长期合作方案,定期交流行业发展及技术动向
搭载清扫模块
研制清扫机器人
搭载光谱探测仪、激光雷达及采摘模块
研制、生产自动采摘机器人
搭载红外相机、高清相机、气体泄漏传感器
研制、生产危险区域巡查机器人
搭载到矿车、卡车、大巴上
研制、生产自动驾驶特种车辆
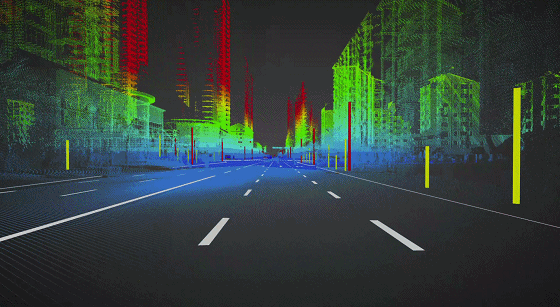
01 激光雷达
激光雷达实时采集环境信息,分析障碍物与智能驾驶的相对位置,评估危险性并规划行驶路径以避障,提升环境适应能力。同时,它还能作为高精度地图点云测图工具,为定位提供数据,并通过点云数据实现特征定位。
02 GNSS
GNSS作为绝对定位设备,实时获取载体的当前位置,为智能驾驶系统提供精准的绝对位置信息。
03 惯性导航系统
惯性导航系统(IMU)实时测量载体的姿态、位置和加速度,具有高数据采集和更新率,提供精确稳定的信息。通过与GNSS结合,IMU利用组合导航融合算法形成高精度的定位系统。
04 工业相机
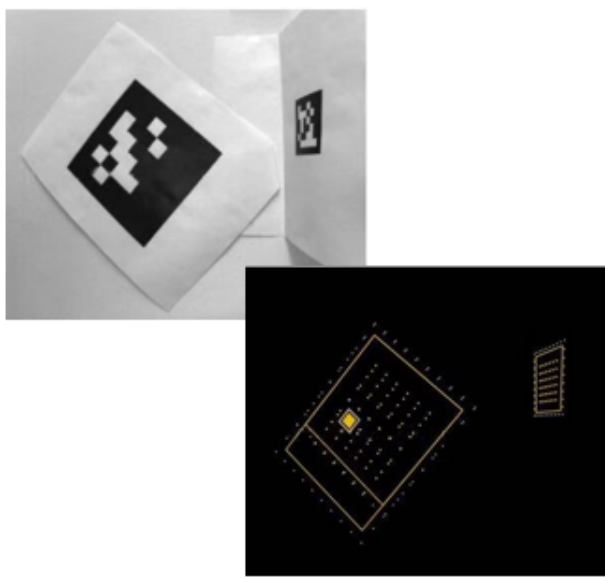
视觉是人类认知效率最高的方式之一,人眼通过观察获取丰富的图像信息。工业相机捕获光线信号并经过处理生成图像。通过视觉算法对图像进行深度分析,可以识别特征点,定位姿态和位置。
05 超声波雷达
超声波雷达成本较低,探测距离近,精度高,且不受光线条件的影响,主要作为一种近距的距离探测手段,防止智能驾驶系统与其他物体之间的碰撞。
06 机器智能平台
智能驾驶系统集成GNSS、惯性导航系统、激光雷达、相机和毫米波雷达等传感器,实时采集和分析环境信息以辅助机器人智能巡检。为了各传感器发挥最佳性能,需要一个多传感器同步控制系统,为传感器提供时间同步和计算支持,实现智能决策控制。
高精度地图
智能驾驶系统在运行前需要创建一个空间,以此为基础实时判断位置。目前的方法是通过构建高精度地图,为系统提供地图数据,帮助识别道路,将传感器数据与地图数据匹配,确定车辆位置和路况。高精度地图是自动驾驶的核心数据,支持精确定位、道路和车道规划,以及车道引导。系统利用这些地图数据实现自动巡航和自主行驶。
组合导航定位
单一定位方式常无法提供稳定、精准的服务。依赖GNSS、惯性导航系统、激光雷达或视觉相机单独使用都难以满足需求。因此,需要综合利用多传感器的优势,通过组合导航和定位,充分发挥各传感器的性能,以实现多环境下的精准定位,确保智能驾驶系统的安全和稳定运行。

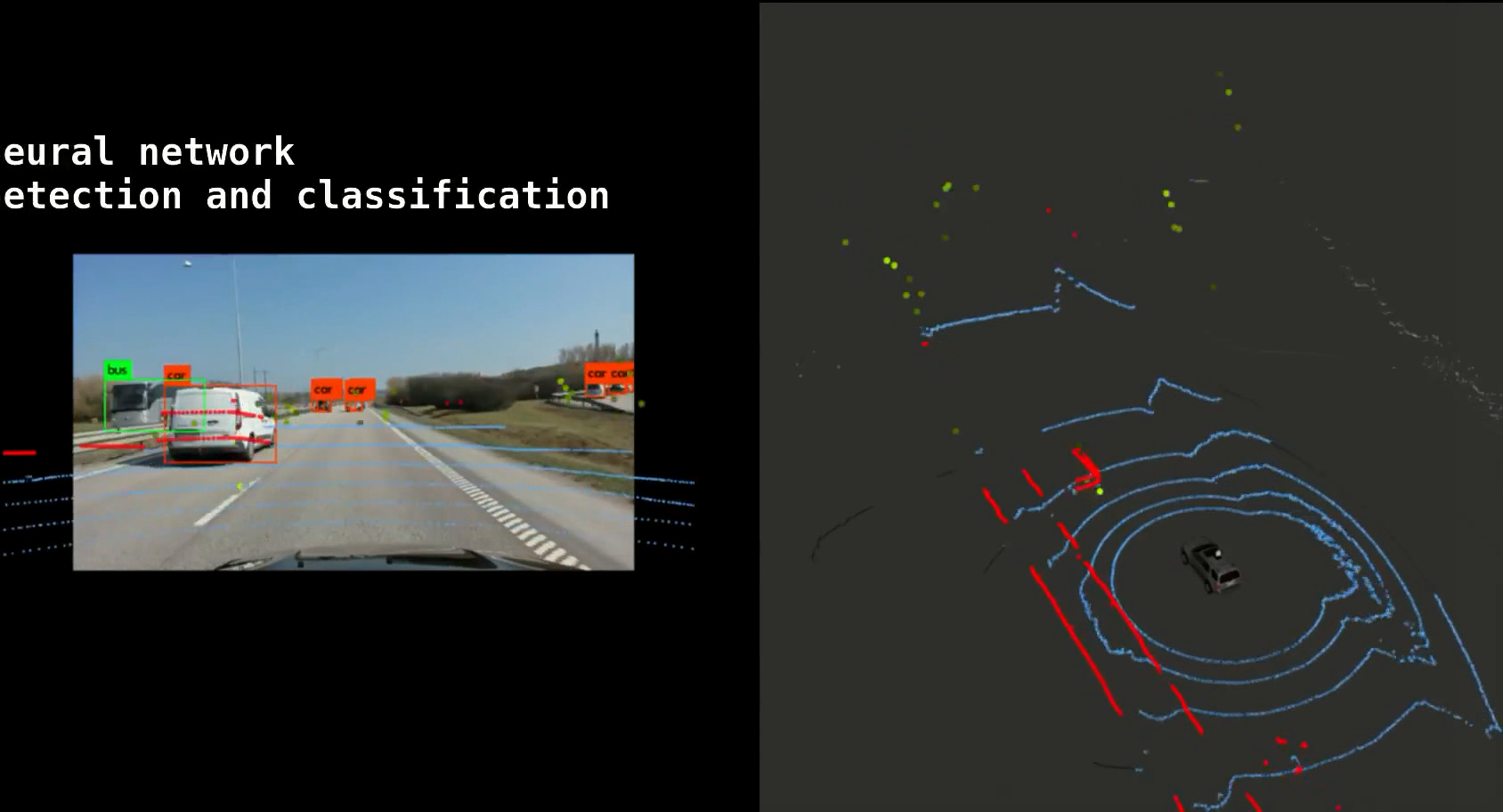
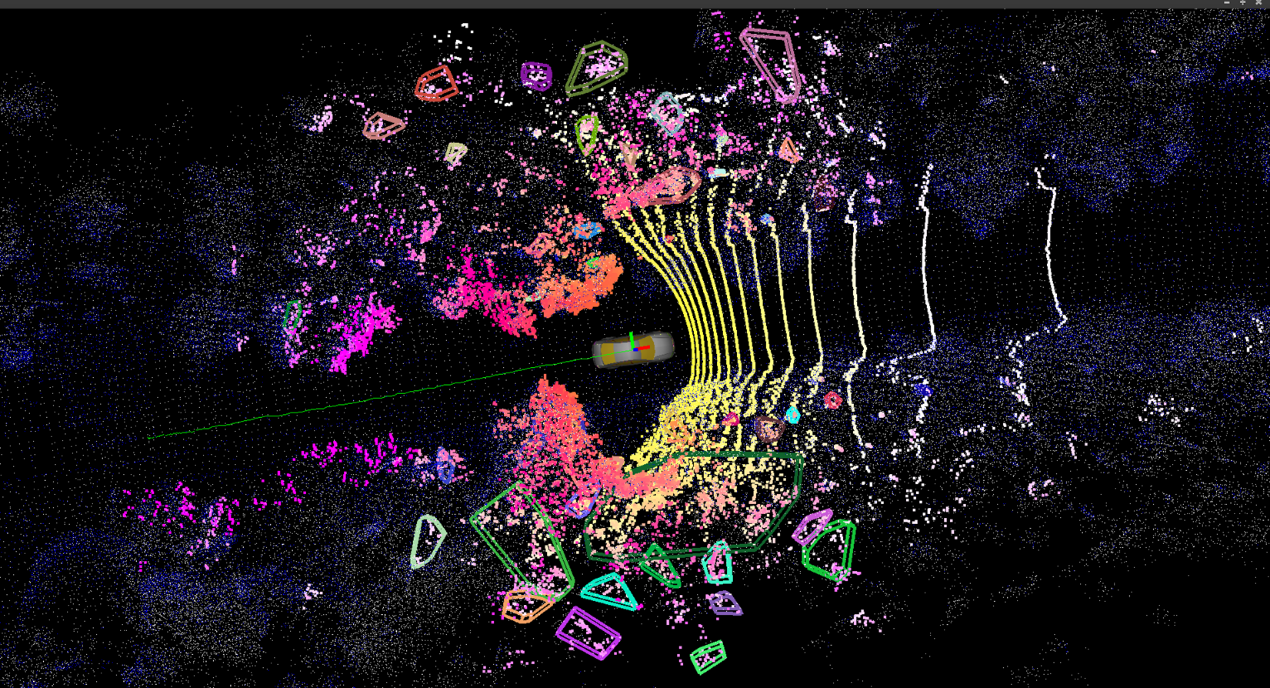
环境感知
智能驾驶系统利用激光雷达、视觉相机、毫米波雷达、超声波雷达等传感器可实现车身周围360°视场角内的环境感知,实现载体周边的地物分类、障碍物识别。
避障绕障
基于实时采集的激光点云、图像、毫米波和超声波数据,以及人工智能算法,机器人能够实时识别车辆和行人,分析环境,确保安全行驶。系统实时感知环境威胁,进行场景建模、分析和预测,以检测障碍物并作出响应,实现局部路径规划,包括自动转向、变道,并在紧急情况时进行制动停车。

智能控制
智能驾驶系统的自动化运行依赖于多种传感器的有效结合。为了使传感器充分发挥优势并稳定获取实时环境信息,系统的智能平台提供了一个控制大脑,支持多传感器信息融合。融合信息用于实时分析、决策和控制智能驾驶系统的行为,如避障、停车和充电等。
高精度定位基站
基准站接受卫星导航信号后,通过数据处理系统形成相应信息,经由卫星、广播、移动通信等手段实时播发给自动驾驶应用终端,实现高精度实时定位服务。


自动充电系统
通过视觉定位辅助,实现1cm的导航精度,是机器人巡查必不可少的功能模块。
| 底盘状态 | 支持CAN总线连接,支持线控 | 支持用户自主选择底盘 |
| 定位定姿 | 1.航向角精度:优于0.1度 | |
| 2.姿态精度:优于0.05度 | ||
| 3.位置精度:10cm | ||
| 激光雷达 | 1.线数:16线 | 支持16/32线激光雷达,支持数量扩展 |
| 2.测距:100m | ||
| 3.激光点数:300,000pts/s | ||
| 4.垂直测角:30°(﹢15°到﹣15°) | ||
| 5.水平测角:360° | ||
| 6.角分辨率(垂直):2° | ||
| 工业相机 | 1.分辨率:640*480 | 支持更换相机(彩色、高光谱等) |
| 2.帧率:155FPS | ||
| 3.有效像素:36万 | ||
| 毫米波雷达 | 1.最小测量范围:1m | 支持用户自行选配 |
| 2.最大测量距离:175m | ||
| 3.距离测量精度范围:0.5m(长距模式),0.25m(中距模式) | ||
| 4.方位视角:20°(长距模式),90°(中距模式) | ||
| 5.垂直视角:4.2~4.75° | ||
| 6.波长:76.5G | ||
| 7.更新周期:小于50ms | ||
| 超声波雷达 | 探测距离:≥4.5m | |
| 授时精度 | 1微秒 | |
| 电源输入 | 直流12~20V | |
| 其它 | 1.支持扩展毫米波雷达 | |
| 2.自建GNSS基站实时差分和网络差分 | ||
| 3.提供GNSS/IMU实时组合导航SDK | ||
| 4.支持Linux系统,提供SDK开发接口 |